相关商品

基于Arduino 互动电子套件 23节经典实验 UNO R3新版
本店售价:¥380.00

32路舵机控制器套装 伺服电机控制器 Arduino舵机扩展板 正品保证
本店售价:¥230.00

爱上Arduino 互动入门套件 中文教材配套 教学视频 UNO R3
本店售价:¥210.00

AS-6DOF 铝合金机械臂 6自由度 机械手 Arduino实验教学平台
本店售价:¥1049.00

Robonova-2 金刚战士 Metal fighter 春晚舞蹈机器人 人形机器人
本店售价:¥9800.00

基于Arduino 互动电子积木套件 arduino UNO R3开发实战 爱上制作
本店售价:¥480.00

32路伺服电机控制器 32路舵机控制器 机器人控制板 机器人配件
本店售价:¥180.00

Arduino Prototype Shield 原型扩展板 万用板(含Mini面包板)
本店售价:¥35.00
Arduino MEGA ProtoShield V3 原型扩展板 万用板(含面包板)
本店售价:¥49.00
Arduino Leonardo 莱昂纳多控制器 原装进口
本店售价:¥178.00

RB Bluetooth Transceiver 蓝牙模块 蓝牙串口 Arduino 单片机
本店售价:¥138.00

6WD 铝合金搜救机器人平台 小车 75:1 轮式机器人平台
本店售价:¥1890.00

RS232-TTL转换器 STC单片机下载器(视频演示)Arduino力荐
本店售价:¥20.00

6V/300R 直流减速电机 Arduino小车 4WD机器人用 电子竞赛
本店售价:¥50.00

AS-6DOF 铝合金机械臂 6自由度 机械手 Arduino实验教学平台 含32路舵机控制部分
本店售价:¥1435.00

Arduino 4WD 移动机器人平台 铝合金小车(黑色) 电子大赛
本店售价:¥209.00

Arduino 4WD 移动机器人平台 铝合金小车电子大赛(12V 100R 金属电机)
本店售价:¥298.00

爱上Processing互动入门套件 UNO R3入门套件 学习套件 Java编程套件
本店售价:¥480.00

六自由度双足机器人套件 AS-6DOF 类人机器人 Robocup比赛力荐 类人型 (不含控制部分)
本店售价:¥1198.00

Arduino RP5履带机器人 寻线避障DIY套件 电子竞赛 机器人教学
本店售价:¥719.00

Arduino 继电器扩展板 Relay Shieldv2.0 支持xbee控制 4路继电器
本店售价:¥86.00

1602液晶扩展板 v2.0 Arduino LCD 1602 Keypad Shield
本店售价:¥95.00

Arduino 土壤湿度传感器 Moisture Sensor 土壤水分 自动浇花
本店售价:¥25.00

Arduino 4WD移动机器人平台 铝合金小车(金色) 电子大赛
本店售价:¥209.00

奥松机器人 MQ2气体传感器 Arduino烟雾甲烷气体检测 正品保证
本店售价:¥43.00

Mini红外避障传感器 光电传感器 Arduino 程控小车 电子竞赛
本店售价:¥49.00

Arduino 双H桥直流电机驱动板 步进电机驱动板 机器人配件
本店售价:¥69.00

USB-TTL转换器 STC单片机下载器 USB转TTL模块 Arduino 电子积木
本店售价:¥35.00
Arduino 无线收发模块 NRF24L01 (升级版) 数传模块 电子大赛
本店售价:¥18.00

Arduino 无线数传 APC220套件 1200米无线传输 射频模块
本店售价:¥270.00

32路舵机控制器 动作存储卡 黑卡容量512K Arduino 机械手 机器人
本店售价:¥209.00

32路舵机控制器 动作存储卡 蓝卡容量512K Arduino 仿生机器人
本店售价:¥209.00

32路舵机控制器动作存储卡 红卡容量512K Arduino力荐 机器人
本店售价:¥209.00

Arduino 火焰传感器 模拟传感器 电子积木 灭火机器人
本店售价:¥22.00

Arduino 电压检测模块 Voltage Sensor 电压传感器 电子积木
本店售价:¥8.00

Arduino LED发光模块 食人鱼灯 白光高亮 数字模块 电子积木
本店售价:¥10.00

Arduino LED发光模块 黄光高亮 食人鱼灯 数字模块 电子积木
本店售价:¥10.00

Arduino传感器 HMC5883L 数字电子罗盘 智能小车 机器人配件
本店售价:¥329.00

FlexiForce Sensor 100磅压力传感器 弯曲压力感测电阻 Sparkfun原装进口
本店售价:¥259.00

Arduino LED发光模块 食人鱼灯 蓝色高亮 数字模块 电子积木
本店售价:¥12.00

Arduino LED发光模块 食人鱼灯 绿色高亮 数字模块 电子积木
本店售价:¥10.00
Arduino Flex单向弯曲传感器 FLX-03 A型 机器人传感器 Sparkfun原装进口
本店售价:¥155.00

Arduino ADXL335模块三轴加速度模块 角度传感器 倾斜角度模块
本店售价:¥55.00

奥松机器人 4定向倾角传感器 高精度角度检测 原装进口 新款上市
本店售价:¥85.00

Arduino LM35线性温度传感器 模拟线性温度传感器 电子积木
本店售价:¥15.00

奥松机器人 Arduino 4WD移动机器人平台 智能车控制 电控驱动套装
本店售价:¥209.00

Arduino 4WD 移动机器人平台 铝合金小车(6V金属电机) 电子大赛
本店售价:¥298.00

奥松机器人 Arduino 6WD移动机器人平台 智能车控制 电控驱动套装
本店售价:¥438.00

田宫 Tamiya Mini优质弹性橡胶轮(4个) Arduino机器人配件 进口
本店售价:¥39.00

现货 英特尔 Intel Edison模块 无扩展板 Galieo升级
本店售价:¥458.00

田宫70096越野轮胎 Tamiya弹性橡胶轮 Pololu原装进口 机器人配件
本店售价:¥49.00
AS-4WD 寻线避障移动机器人 电子竞赛 机器人教学
本店售价:¥1100.00
AS-4WD铝合金自主碰撞机器人套件 机器人小车 智能车 Arduino机器人权威
本店售价:¥668.00
HCNE1-0530 框架式电磁铁 12V推拉式 微型直流 推拉式5N 行程10mm
本店售价:¥19.00

42BYGHW609步进电机 42HYGHW 步进电机 1.7A 3D 打印机 NEMA17
本店售价:¥59.00

Mini双轴直流减速电机1:120 马达Arduino 程控小车 轮式机器人
本店售价:¥13.00

轮式机器人万向轮 3D打印车轮 钢球直径15mm 程控小车 机器人配件
本店售价:¥12.00

轮式机器人万向轮 3D打印轮身 钢球直径13mm 程控小车 机器人配件
本店售价:¥12.00
【创客学堂】浅析AS-4WD寻线避障轮式机器人---组装与调试
编辑:Lucas2013-12-17 131202060@qq.com 浏览次数:1222
俗话说的好“万事开头难”,对于Arduino学习爱好者来说,在研究AS-4WD寻线避障机器人的道路上经常会遇到一些问题,在此我本人将以一个过来者的角度,通过长期的经验积累,对在研究AS-4WD过程中的问题进行总结。同时依同志的建议,我经过一连夜的整理终于完成了第一部分的结稿,当然了近期还将发布第二期,希望我的努力对大家有所帮助。
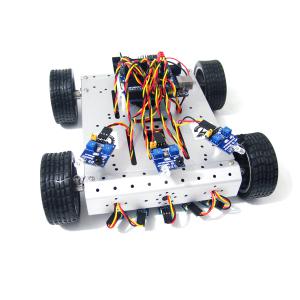
一.AS-4WD的“眼睛”-------寻线避障传感器
AS-4WD兼备寻线蔽障两种功能,在寻线和避障方面所用的传感器主要是光电对管,它犹如AS-4WD的眼睛一样,其工作特点是:当检测到黑线时,接收管接受不到发射管的反射光线(黑色会吸光,无反射),红外接收三极管截止,输出端输出一个低电平,相反检测到白线则输出端输出一个高电平,当然我们需在输出端加一个电压比较器(如LM339)。整个系统的主控是Arduino控制器。


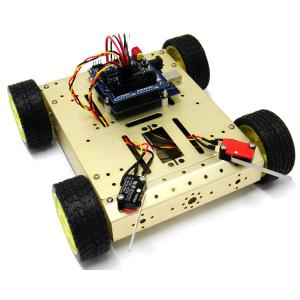
二.AS-4WD的“骨骼”--------套件
“巧妇难为无米之炊”,在安装前,确保我们的套件材料是完整的,具体套件资源如下:
1.平台上板(1个)
2.平台下板(1个)
3.平台端板(2个)
4.拨动开关(1个)
5.充电接口(1个)
6.直流电机(4个)

7.电机驱动板(1个)

8.车轮(4个)
9.Arduino控制板(1个)
10.红外避障传感器(3个)
11.十字槽螺钉
12.六角螺母
13.热缩管
14.导线
15.扎带
16.寻线传感器(5个)
17.供电电池7.4V
18.电池充电器
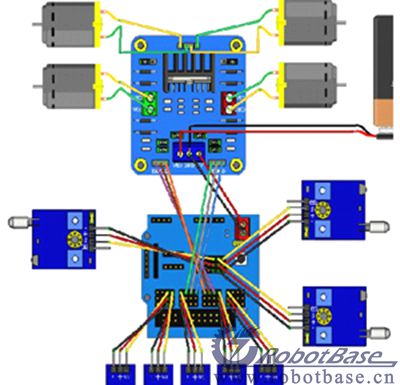
三. AS-4WD的“整形”--------组装
希望大家养成良好的布线习惯,祝你成功!!!!
四.AS-4WD的“新大陆”------问题分析
也许起初你在安装和调试时经常遇到这样或那样的问题,怎么办?不急,请看下面我为大家准备的8道“美食大餐”吧!!,仔细瞧瞧哪一款是你的菜!!
1.在安装AS-4WD过程中确保小车两侧的车轮转向一直,具体方法是,将直流电机接好后,转动每一侧的车轮,观察转向是否一致,如不一致,及时更改电机的连线。
2.测试AS-4WD前,检查各线路的连线,调整蔽障传感器的灵敏度到一个合适的距离,如发现传感器工作不正常,检查线路是否接错,在检查无连接错误后,在用万用表测量传感器的输出端电压,检查传感器是否坏掉。
3.如确保连线及电机转向的前提下,当下入程序时,如发现小车初始状态(应该是前进)不是前进,则调整寻迹传感器的位置,看是否能解决。
4.测试AS-4WD前,一定要检查电源是否短路(可用万用表测量),切记!
5.测试AS-4WD时,大家可以一项一项的测试,比如下载一个单独前进的程序(将其他的程序屏蔽掉)
6.如果在一切检查完毕后,进行5,如发现与程序设定的状态不同,则可能原因是程序不符,大家可以试着进行修改(改写各状态对应程序函数的电平状态值)
7.检查AS-4WD的电池的电量情况

8.在测试AS-4WD寻迹功能前,请调整好传感器的位置(可以通过平移车身观察传感器电路上的指示灯的亮灭来调节传感器到一个合适的位置)
五.AS-4WD的“未知领域”--------扩展与提高
大家可以试着在程序中引入PID(比例,微分,积分)算法控制同时提高一下占空比,试试看吧!怎样做才能使AS-4WD车子更稳定,跑的更快那?
在下期的章节中我将重点为大家详细介绍一下软件如何控制电机,期待大家的关注!!!下期见!!!
相关链接
Arduino UNO 控制器:http://www.alsrobot.cn/goods-141.html
传感器扩展板V5.0:http://www.alsrobot.cn/goods-147.html
Mini 避障传感器:http://www.alsrobot.cn/goods-41.html
Makerbot 3D打印机:http://www.alsrobot.cn/goods-396.html
用户评价
暂时还没有任何用户评论


