相关商品


【新奇特】集锦:人形机器人进化史
编辑:sophie2013-07-22 浏览次数:2902
.jpg)
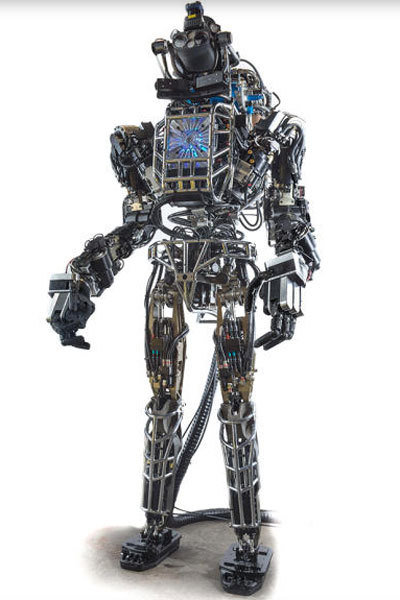
RPA近期揭晓了一款最吓人的未来派机器人Atlas“阿特拉斯”。这款巨大的人形机器人6英尺高,由波士顿动力公司研发。Atlas有28个液压驱动关节,是目前最先进的一款机器人。最近我收集了近30年的一些两足机器人,回顾30年,机器人具有更好的传感器、类似肌肉的致动器和更为先进的规划控制系统,机器人已经越来越像真人。人工替代是大势所趋,相信人机并行的时代已经离我们并不遥远。现在就让我带你一起看看机器人的进化史吧。
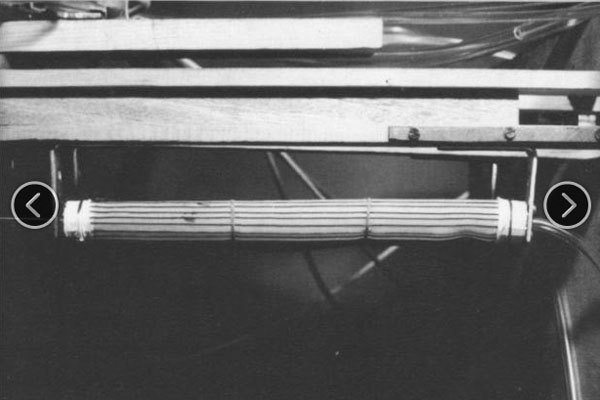
1.胶人造肌肉机器人,1967
1967年,早期机器人研究中心日本早稻田大学的Ichiro Kato教授及其团队研发出人造肌肉。沿轴内嵌几股线中的橡胶首次产生了类似肌肉的运动,橡胶由于线的横向压缩发生了纵向收缩。
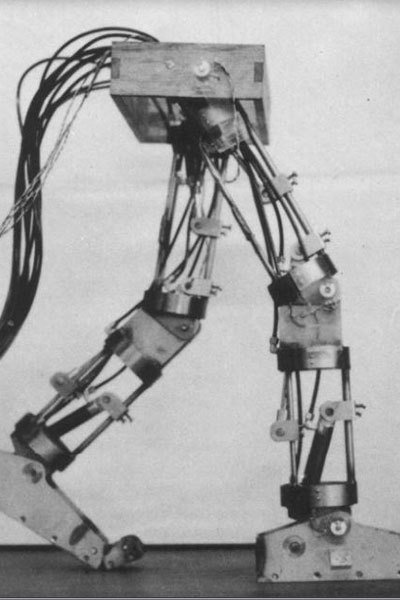
2.从式人形步行机机器人,1968
早稻田大学的WL-3是下肢运动的力学模型,内部有电动液压的伺服电机,通过主从式方式受控。WL-3首次可以像人一样摇摆站立,下肢可以起立坐下。
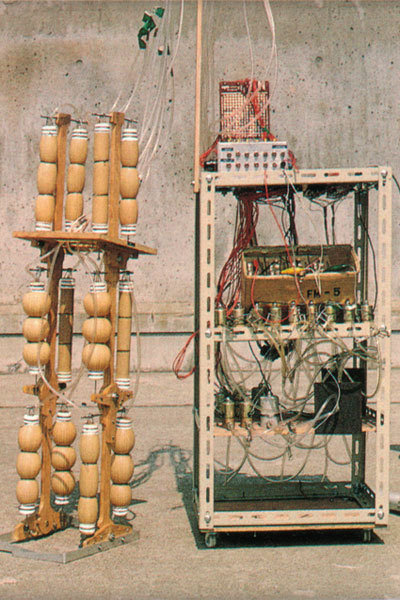
3.胶制成的人造肌肉机器人,1969
拟人化的气动激活装置WAP-1 具有由橡胶制成的人造肌肉,并且与一个致动器相连。通过控制人造肌肉,两脚便可以运动起来。
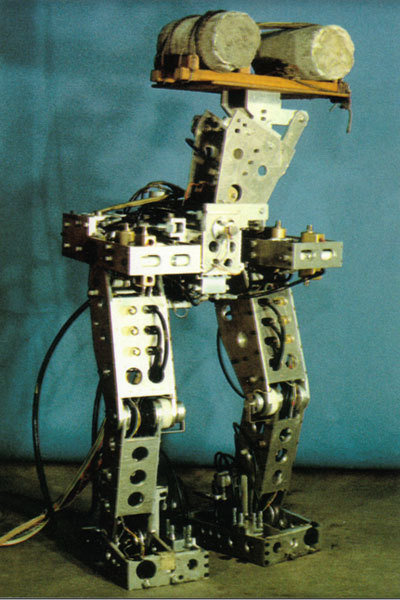
4.静态行走机器人, WL-5,1970
早稲田大学的WL-5机器人受控于一台小型计算机,可以行走并改变方向,但是该机器人移动速度很慢,每步要用45秒钟。
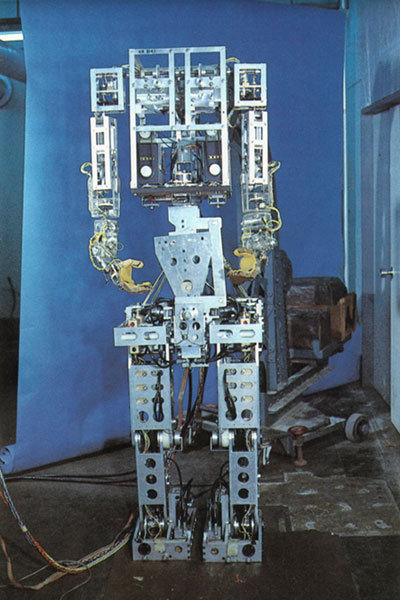
5.Wabot-1, 1973
Wabot-1是世界上第一个真人大小的人形机器人,融合肢体运动控制系统,视觉系统和沟通平台于一身。Wabot-1内部的传感器使其可以测量到物体的距离和方向,机器人可以行走甚至使用带有触觉传感器的手臂抓住并移动物体。
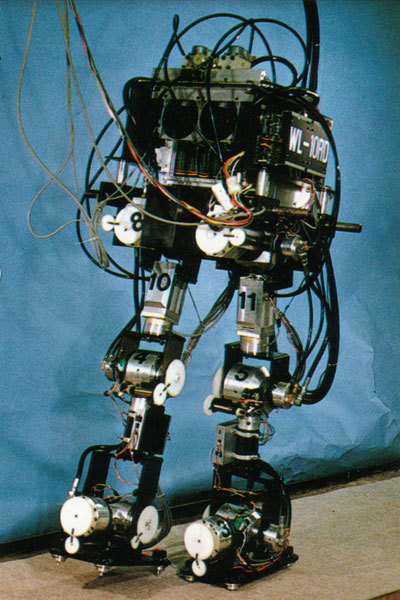
6.实现动态行走,1984
早稻田大学的WL-10RD具有踝关节和髋关节,这样机器人两腿之间可以很好地掌握平衡。这项科技进步使得机器人行走成为现实。
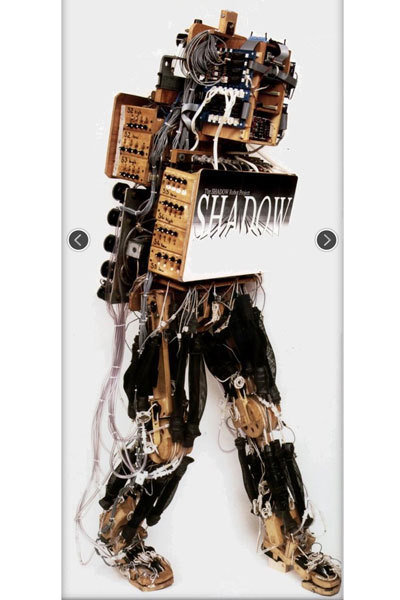
7.Shadow,1987
Shadow机器人公司由理查德•格林希尔(Richard Greenhill)在1987年建立,一直致力于制造机器人,开发相关技术,旨在制造可以完成家中日常任务的多功能机器人。
8.Manny, 1989
西北太平洋国家实验室(Pacific Northwest National Laboratory)机器人Manny于1989年为美国军队建造。当时的Manny与真人一样大小,与人非常相似,但是并不智能,也不能自动移动。

9. P2,1996
1996年12月20日,本田的身高6英尺、体重460磅、靠电池供电的P2机器人在东京推出,P2具有Asimo的行走技能,甚至可以爬楼梯,本田称之为“第一个自动调节的、可行走的人形机器人。”

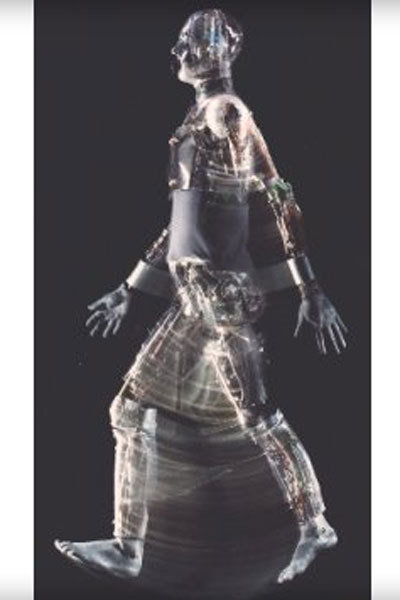
10.H5,1998
1998年,东京大学的JSK实验室制造了真人一样大小的H5机器人。
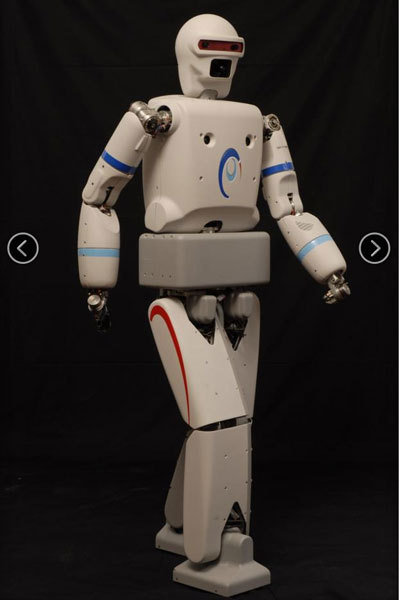
11.REEM-A, 2005
REEM-A是一款可以行走、具有语言和视觉功能的机器人平台,完成于2005年。2006年,该机器人参加了不来梅港市的RoboCup比赛,赢得了竞步比赛,并通过点球成功晋级半决赛。
2007年,运行与06年同样软件的REEM-A参加了在亚特兰大举行的RoboCup,并晋级点球比赛的决赛。

12.Robothespian, 2005
Robespierre始于2005年的英国,由Engineered Arts Limited公司推出,Robespierre机器人使用简单、理解多种语言、能够和人交流互动,目前售价为85,000美元。

13.HRP-3 Promet, 2007
2007年6月21日,HRP-3 Promet Mk-II, HRP-2 Promet, 和HRP-3模型的人形机器人在东京北部城市宇都宫附近Haga镇川田工业实验室的预览发布会上展示。160厘米高、68千克的人形机器人HRP-3 Promet是HRP-2 Promet人形机器人的升级模式,由川田工业、日本高级工业科学技术研究所和川崎重工业联合打造。

14.Dexter, 2007
图中跳跃的Dexter有5英尺10英寸高,重135磅。他可以行走、跳跃、像人一样平衡地站立。Anybots在机器人体内生成可以区分向上还是向下的系统。调节机器人腿部的“肌肉”,或者说气缸。
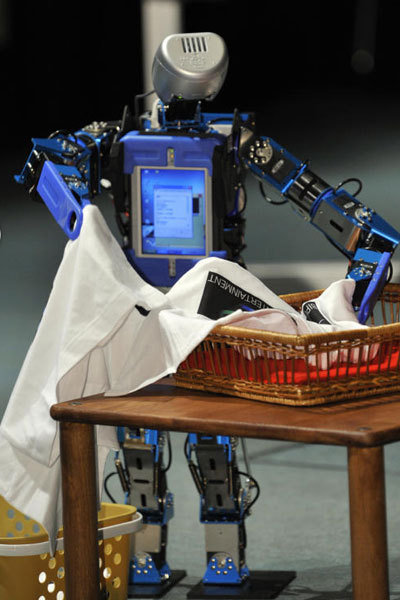
15.Aero-Blue, 2008
2008年8月17日,在东京郊区神奈川县川崎举行的家用机器人比赛中,人形机器人Aero-Blue从洗衣篮中拿起一件T恤衫。机器人越来越能够胜任日常工作。

16.本田的Asimo
本田的人形机器人Asimo于2011年4月28日在圣路易斯America's Center的FIRST Championships(每年一次的为期三天半的机器人锦标赛)上亮相。
17.物理智能
这些机器人有更优的控制系统、传感器和栩栩如生的致动器,已经可以向更先进的领域进发,使用为人所用的工具。接下来呢?当然是大脑——DARPA已经开始致力于这方面了。
今年早些时候,加州大学洛杉矶分校的化学教授James K. Gimzewski在《国防杂志》中表示,通过模仿大脑的自组织特征,我们可以翘首以盼机器人系统的革命性突破。
Gimsewski供职于DARPA的物理智能计划。他说,“我们并不是像传统计算机那样把信息从存储器传至处理器,而是以全新的方式处理信息。
用户评价
暂时还没有任何用户评论


