相关商品





【创客学堂】基于Kinect 体感操作的多自由度并联机械手
编辑:thunder2013-11-06 694625531@qq.com 浏览次数:1354
随着时代的演进,先进的机器人也不断增加,设计者们总是要面对新的挑战!……
今天,给大家带来的是一款基于Arduino和kinect组合的机器人,命名为Kinect互动机器人。如果有关注我们的网站的话,相信大家一定会看过关于Kinect的文章,《Arduino与Kinect打造“体感智能车”》和《kinect实现3D扫描助力3D打印》,在这两篇文章中,也一定会对Kinect有所了解,在这里就不会过多的介绍了。
Kinect 体感传感器识别人手动作从而在工作区域内进行作业,适合夹取小型且重量轻的工件,具有移动速度快,定位精确高等优点。它可以通过PC使用上位机软件操控,也可以用51单片机、Arduino等控制器二次开发使用,同时还可以使用Raspberry Pi、PcDuino等嵌入式控制器进行操控,适用于工业生产、医疗机械和建筑等多种领域,同样也可以适用娱乐项目。
当然,在拼装机器人之前呢,我们要先准备一下所需要的产品吧!
.jpg)
Arduino Mega ADK 2560

Arduino MEGA Sensor Shield V2.0 专用传感器扩展板

RB-150MG

机械臂夹持器

双路输出开关电源
当然 ,这只是其中的一小部分哦,X-BOX360这个神器呢,也是可以点击这里(⊙o⊙),询问客服购买哦。
好了,言归正传,Kinect机器人的控制程序都可以在网上进行下载,这里呢,就不给大家 过多的解释了。还有我们的支架和底盘没有固定的尺寸要求,不过,在写程序的时候,还是要将里面的参数进行必要的修改。现在主要把我们机械的连接结构给大家简单的说一下,首先,就是主体框架了,为了有更好的坚固结构,推荐使用型材,如下图:
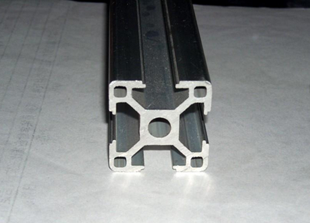
型材
还有要准备好连接件,比如航母拉杆,就是很不错的选择,还有鱼眼轴承,最好在弄个方形铝管,还有我用3D打印机打印出来的连接件。
.jpg)
鱼眼轴承

航模拉杆

黑色的零件就是3D打印出来的哦,强度很不错
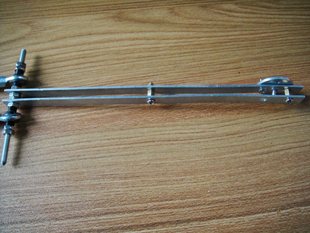
代替方形铝管

鱼眼连接
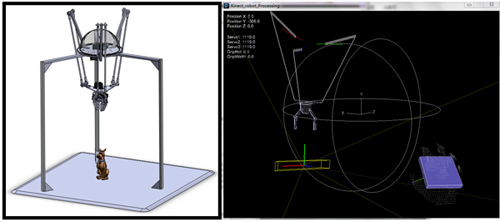
好了整体的结构大概就是这样了,其实连接的方法不是固定的,只要有合理性,可以完成所需要的运动要求都是可以的。

kinect让上海市民络绎不绝
这篇文章整体都在介绍Kinect机器人的机械部分,不说程序,是因为在网上有很多类似的,不需要特指那个程序,现在的Kinect机器人只是个雏形,后期还是要进行改进的。
相关连接:
Arduino Mega ADK 2560购买地址:http://www.alsrobot.cn/goods-145.html
RB-150MG购买地址:http://www.alsrobot.cn/goods-105.html
机械臂夹持器购买地址:http://www.alsrobot.cn/goods-404.html
双路输出电源开关购买地址:http://www.alsrobot.cn/goods-239.html
Arduino MEGA Sensor Shield V2.0购买地址:http://www.alsrobot.cn/goods-148.html
用户评价
暂时还没有任何用户评论


